|
焊缝总长度 |
62687mm |
|
所需时间 |
|
焊缝个数 |
100 |
|
|
|
焊接时间 |
62687mm(焊缝总长) |
3mm/s(焊接速度) |
20896s |
|
辅助时间 |
100(焊缝个数) |
10s(起收弧时间和空行程时间) |
1000s |
|
外部轴机构行走时间 |
28(节点数量) |
10s(移动到每个节点的时间) |
280s |
|
扫描时间 |
62687mm(焊缝总长) |
30mm/s(扫描速度) |
2090s |
|
单个机器人时长 |
20896+1000+280+2090 |
24266s(总时长) |
6h43min |
|
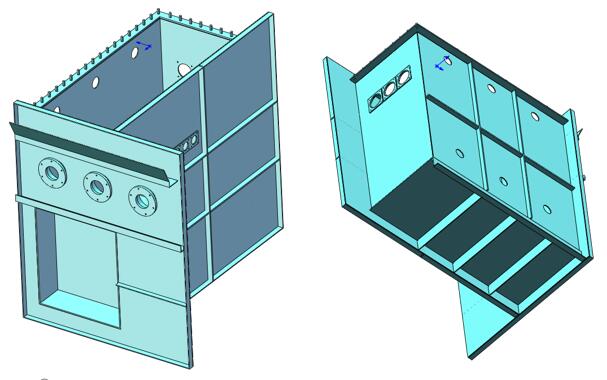
以S18-3150/35/0.8油箱为例扫描加焊接时间≈7h |
|||
|
焊缝总长度 |
62687mm |
|
所需时间 |
|
焊缝个数 |
100 |
|
|
|
焊接时间 |
62687mm(焊缝总长) |
6mm/s(焊接速度) |
10448s |
|
辅助时间 |
100(焊缝个数) |
10s(起收弧时间和空行程时间) |
1000s |
|
外部轴机构行走时间 |
28(节点数量) |
10s(移动到每个节点的时间) |
280s |
|
扫描时间 |
62687mm(焊缝总长) |
30mm/s(扫描速度) |
2090s |
|
单个机器人时长 |
10448+1000+280+2090 |
19818s(总时长) |
3h51min |
|
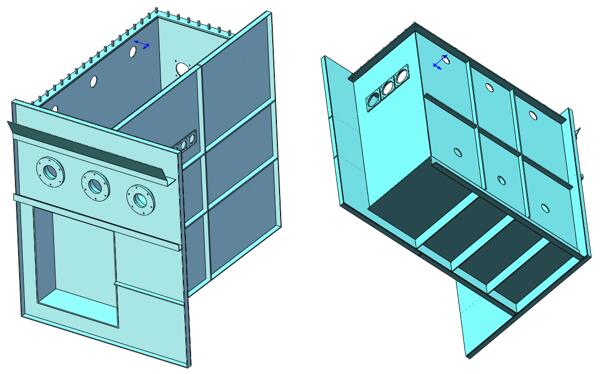
以S18-3150/35/0.8油箱为例扫描加焊接时间≈4h |
|||